2D Topology Optimization Example
Classic 2D Structured Meshes
In this example we will show how you can use pyFANTOM to perform minimum compliance TO on structured meshes in 2D. For this example we will perform TO on the bridge problem.
Below we detail how you can do this in a few lines of code!
Importing The Necessary Tools
First we import the tools from pyFANTOM we will be using in this example.
from pyFANTOM.CPU import(
StructuredMesh2D, # Mesh Object for 2D Structured Meshes
StructuredFilter2D, # Filter kernel for 2D Structured Meshes
StructuredStiffnessKernel, # Stiffness Kernel for 2D Structured Meshes
FiniteElement, # Finite Element Object to Setup Boundary Conditions and RHS
CHOLMOD, CG, GMRES, MultiGrid, SPLU, SPSOLVE, # Sparse Solvers
MinimumCompliance, # TO Problem Definition
PGD, MMA, OC # Nonlinear Optimizers
)
from pyFANTOM.Physics import LinearElasticity # Physics Model For FEA
# Other Imports
import numpy as np
import matplotlib.pyplot as plt
from tqdm import trange
Setting Up Physics and Geometry
The first step in using pyFANTOM is defining the domain of the problem and setting up the physics for FEA.
length = 1.0
height = 0.25
# Create a physics model
physics = LinearElasticity(E=1.0, nu=1/3, thickness=1.0, type='PlaneStress')
# Create a mesh
mesh = StructuredMesh2D(nx=256, ny=64, lx=length, ly=height, physics=physics)
Setting Up The Finite Element Solver
The next step in using pyFANTOM is setting up a stiffness kernel and finite-element boundary conditions.
# Create a stiffness kernel
stiffness_kernel = StructuredStiffnessKernel(mesh=mesh)
# Create a solver
solver = CHOLMOD(kernel=stiffness_kernel) # This can be any of the sparse solvers in pyFANTOM
# Create a finite-element object
fe = FiniteElement(mesh=mesh, kernel=stiffness_kernel, solver=solver)
# Visualize the problem
plt.figure(figsize=(10, 5))
fe.visualize_problem()
plt.tight_layout()
plt.axis('off')
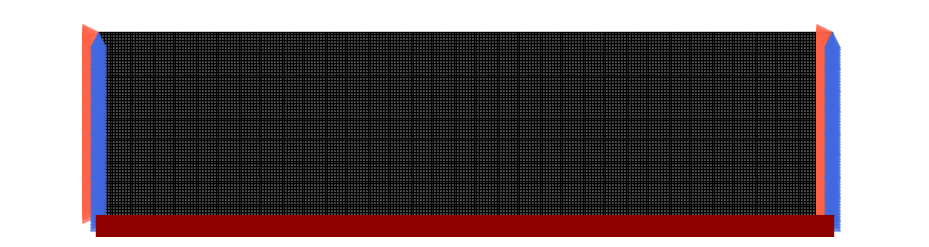
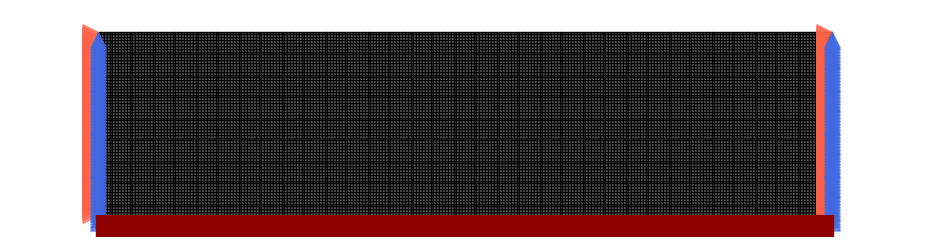
As seen above we do not have loads or boundary conditions. So now we will set this up for the bridge problem:
left_edge_nodes = np.where(mesh.nodes[:, 0] < 1e-12)[0]
right_edge_nodes = np.where(mesh.nodes[:, 0] > length - 1e-12)[0]
bottom_edge_nodes = np.where(mesh.nodes[:, 1] < 1e-12)[0]
fe.reset_dirichlet_boundary_conditions()
fe.reset_forces()
# Apply force to the bottom edge
fe.add_point_forces(
node_ids=bottom_edge_nodes,
positions=None,
forces=np.array([[0.0, -1.0/len(bottom_edge_nodes)]])
)
# Apply zero displacement to the left edge and the right edge
fe.add_dirichlet_boundary_condition(
node_ids=np.concatenate([left_edge_nodes, right_edge_nodes]), # Node IDs to apply the boundary condition to
positions=None, # Alternative way to specify the boundary condition is to pass positions in space
dofs=np.array([[1, 1]]), # Degrees of freedom to apply the boundary condition to
rhs=0.0 # Value to apply the boundary condition to
)
# Visualize the problem
plt.figure(figsize=(10, 5))
fe.visualize_problem()
plt.tight_layout()
# plt.autoscale(enable=True)
plt.margins(0.12)
plt.axis('off')
Setting Up TO Problem And Optimizer
Once the finite element is setup we can define the problem and optimizer to perform TO.
# Define the filter kernel for TO
filter_kernel = StructuredFilter2D(mesh=mesh, r_min=1.5)
# Define the TO problem
to_problem = MinimumCompliance(
FE=fe,
filter=filter_kernel,
E_mul=[1.0], # You can pass a list of values to perform multi-material TO
volume_fraction=[0.2], # You can pass a list of values to perform volume fraction control for each material
void=1e-9, # You can pass a value to set void modulus
penalty=3, # You can pass a value to set penalty factor
#penalty_schedule = lambda p, i: (p-1)*np.round(4 * min(100, i) / 100)/4 + 1, # You can pass a function to set penalty schedule here
heavyside= True, # You can pass a boolean to use heavyside or not
eta=0.5, # You can pass a value to set eta - only used for heavyside
beta=2.0, # You can pass a value to set beta, or a function of iteration to set beta schedule - only used for heavyside
)
# Define the optimizer
optimizer = PGD( # You can use any of the optimizers in pyFANTOM: OC, MMA, PGD
problem=to_problem,
change_tol=np.inf, # No change tolerance
fun_tol=1e-4, # Function tolerance (convergence criterion for the optimizer)
)
Running The Optimization Loop
Now we can run the optimization loop and perform TO.
maximum_iterations = 300
Progressbar = trange(maximum_iterations, desc='Optimizer Iterations', leave=True)
objective_history = []
for i in Progressbar:
optimizer.iter()
Progressbar.set_postfix(
optimizer.logs()
)
objective_history.append(optimizer.logs()['objective'])
if optimizer.converged():
print(f'Converged in {i} iterations')
break
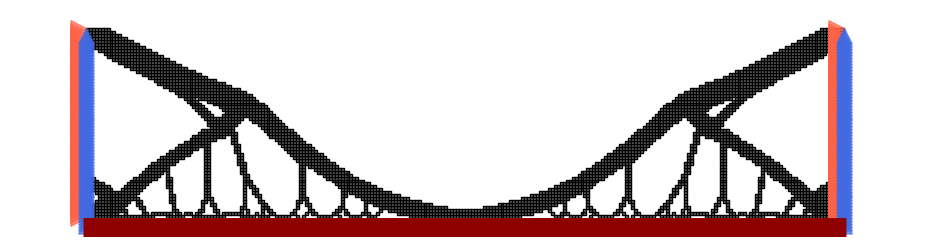
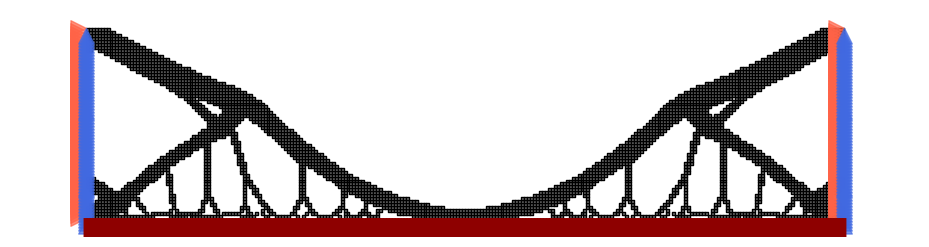
The optimization converged in 56 iterations with the following output:
Optimizer Iterations: 19%|█▊ | 56/300 [01:04<04:40, 1.15s/it, objective=11.6, variable change=0.936, function change=5.92e-5, iteration=58, residual=2.56e-12] Converged in 56 iterations
Now we can visualize the resulting topology:
plt.figure(figsize=(10, 5))
to_problem.visualize_solution()
plt.tight_layout()
# plt.autoscale(enable=True)
plt.margins(0.1)
plt.axis('off')
Running on GPU
The exact same problem can be run on GPU by just switching the backend.
A few notes on CUDA back-ends: - In general the only exact solver available for CUDA is SPSOLVE, but in general for structured meshes the Multi-Grid solver with our custom CUDA kernels is the fastest solver on GPU. - The CUDA backend uses cupy, however, the inputs to the FE class can be numpy arrays.
from pyFANTOM.CUDA import(
StructuredMesh2D, # Mesh Object for 2D Structured Meshes
StructuredFilter2D, # Filter kernel for 2D Structured Meshes
StructuredStiffnessKernel, # Stiffness Kernel for 2D Structured Meshes
FiniteElement, # Finite Element Object to Setup Boundary Conditions and RHS
CG, GMRES, MultiGrid, SPSOLVE, # Sparse Solvers
MinimumCompliance, # TO Problem Definition
PGD, MMA, OC # Nonlinear Optimizers
)
from pyFANTOM.Physics import LinearElasticity # Physics Model For FEA
# Other Imports
import numpy as np
import matplotlib.pyplot as plt
from tqdm import trange
length = 1.0
height = 0.25
# Create a physics model
physics = LinearElasticity(E=1.0, nu=1/3, thickness=1.0, type='PlaneStress')
# Create a mesh
mesh = StructuredMesh2D(nx=256, ny=64, lx=length, ly=height, physics=physics)
# Create a stiffness kernel
stiffness_kernel = StructuredStiffnessKernel(mesh = mesh)
# Create a solver
solver = MultiGrid(
mesh=mesh,
kernel=stiffness_kernel,
maxiter=200,
tol=1e-4,
n_level=3,
cycle='W',
w_level=1
)
# Create a finite-element object
fe = FiniteElement(mesh=mesh, kernel=stiffness_kernel, solver=solver)
left_edge_nodes = np.where(mesh.nodes[:, 0] < 1e-12)[0]
right_edge_nodes = np.where(mesh.nodes[:, 0] > length - 1e-12)[0]
bottom_edge_nodes = np.where(mesh.nodes[:, 1] < 1e-12)[0]
fe.reset_dirichlet_boundary_conditions()
fe.reset_forces()
# Apply force to the bottom edge
fe.add_point_forces(
node_ids=bottom_edge_nodes,
positions=None,
forces=np.array([[0.0, -1.0/len(bottom_edge_nodes)]])
)
# Apply zero displacement to the left edge and the right edge
fe.add_dirichlet_boundary_condition(
node_ids=np.concatenate([left_edge_nodes, right_edge_nodes]), # Node IDs to apply the boundary condition to
positions=None, # Alternative way to specify the boundary condition is to pass positions in space
dofs=np.array([[1, 1]]), # Degrees of freedom to apply the boundary condition to
rhs=0.0 # Value to apply the boundary condition to
)
# Define the filter kernel for TO
filter_kernel = StructuredFilter2D(mesh=mesh, r_min=1.5)
# Define the TO problem
to_problem = MinimumCompliance(
FE=fe,
filter=filter_kernel,
E_mul=[1.0], # You can pass a list of values to perform multi-material TO
volume_fraction=[0.2], # You can pass a list of values to perform volume fraction control for each material
void=1e-9, # You can pass a value to set void modulus
penalty=3, # You can pass a value to set penalty factor
#penalty_schedule = lambda p, i: (p-1)*np.round(4 * min(100, i) / 100)/4 + 1, # You can pass a function to set penalty schedule here
heavyside= True, # You can pass a boolean to use heavyside or not
eta=0.5, # You can pass a value to set eta - only used for heavyside
beta=2.0, # You can pass a value to set beta, or a function of iteration to set beta schedule - only used for heavyside
)
# Define the optimizer
optimizer = PGD( # You can use any of the optimizers in pyFANTOM: OC, MMA, PGD
problem=to_problem,
change_tol=np.inf, # No change tolerance
fun_tol=1e-4, # Function tolerance (convergence criterion for the optimizer)
)
# Visualize the problem
plt.figure(figsize=(10, 5))
fe.visualize_problem()
plt.tight_layout()
# plt.autoscale(enable=True)
plt.margins(0.12)
plt.axis('off')
maximum_iterations = 300
Progressbar = trange(maximum_iterations, desc='Optimizer Iterations', leave=True)
objective_history = []
for i in Progressbar:
optimizer.iter()
Progressbar.set_postfix(
optimizer.logs()
)
objective_history.append(optimizer.logs()['objective'])
if optimizer.converged():
print(f'Converged in {i} iterations')
break
The GPU optimization converged in 43 iterations:
Optimizer Iterations: 14%|█▍ | 43/300 [00:09<00:55, 4.63it/s, objective=11.7, variable change=2, function change=2.32e-5, iteration=45, residual=8.85e-5] Converged in 43 iterations
plt.figure(figsize=(10, 5))
to_problem.visualize_solution()
plt.tight_layout()
# plt.autoscale(enable=True)
plt.margins(0.1)
plt.axis('off')
Unstructured Meshes
pyFANTOM also supports unstructured meshes for topology optimization. Below we will use pygmesh to mesh a 2D model and perform TO on it.
NOTE: - This is a toy problem to represent the capabilities of the package not a real-world problem. - The Multi-Grid solver which is the most efficient way to solve the FEA problem is only available for structured meshes. So you may want to consider voxelizing geometry in some cases.
from pyFANTOM.CPU import(
GeneralMesh, # Mesh Object for Unstructured Meshes
GeneralFilter, # Filter kernel for Unstructured Meshes
GeneralStiffnessKernel, UniformStiffnessKernel, # Stiffness Kernel for Unstructured Meshes
FiniteElement, # Finite Element Object to Setup Boundary Conditions and RHS
CHOLMOD, CG, GMRES, MultiGrid, SPLU, SPSOLVE, # Sparse Solvers
MinimumCompliance, # TO Problem Definition
PGD, MMA, OC # Nonlinear Optimizers
)
from pyFANTOM.Physics import LinearElasticity # Physics Model For FEA
import pygmsh
# Other Imports
import numpy as np
import matplotlib.pyplot as plt
from tqdm import trange
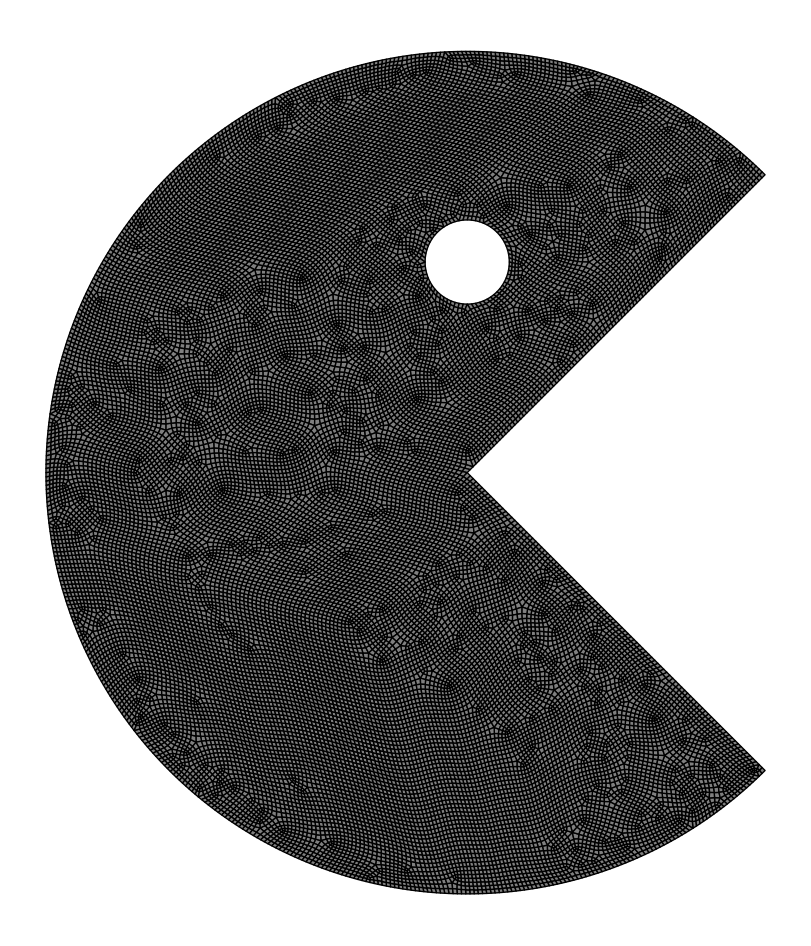
Create A Pac-Man Mesh
Below we will make a toy problem mesh using pygmesh.
# Unstructured Uniform Mesh generate on a random domain
with pygmsh.geo.Geometry(['-setnumber', 'Mesh.Algorithm', '6',
'-setnumber', 'Mesh.RecombinationAlgorithm', '3',
'-setnumber', 'Mesh.RecombineAll', '1',
'-setnumber', 'Mesh.SaveWithoutOrphans', '1']) as geom:
# Pacman parameters
body_center = [0.5, 0.5, 0.0]
body_radius = 0.5
mouth_angle = 45 # Half-angle for the mouth (in degrees)
eye_center = [0.5, 0.75, 0.0]
eye_radius = 0.05
# Define the mouth as a wedge
p1 = geom.add_point(
[
body_center[0] + body_radius * np.cos(-np.pi/4),
body_center[1] + body_radius * np.sin(-np.pi/4),
0.0,
],
mesh_size = 0.005
)
p2 = geom.add_point(
[
body_center[0] + body_radius * np.cos(np.pi/4),
body_center[1] + body_radius * np.sin(np.pi/4),
0.0,
],
mesh_size = 0.005
)
p3 = geom.add_point(
[
0.0,
0.5,
0.0,
],
mesh_size = 0.005
)
center_point = geom.add_point(body_center, mesh_size = 0.005)
mouth_line1 = geom.add_line(center_point, p2)
mouth_line2 = geom.add_line(p1, center_point)
arc1 = geom.add_circle_arc(p2, center_point, p3)
arc2 = geom.add_circle_arc(p3, center_point, p1)
loop = geom.add_curve_loop([mouth_line1, arc1, arc2, mouth_line2])
eye_center_point = geom.add_point(eye_center,
mesh_size = 0.005)
eye_right_point = geom.add_point([eye_center[0] + eye_radius, eye_center[1], 0.0],
mesh_size = 0.005)
eye_left_point = geom.add_point([eye_center[0] - eye_radius, eye_center[1], 0.0],
mesh_size = 0.005)
eye_arc1 = geom.add_circle_arc(eye_right_point, eye_center_point, eye_left_point,)
eye_arc2 = geom.add_circle_arc(eye_left_point, eye_center_point, eye_right_point)
eye_loop = geom.add_curve_loop([eye_arc1, eye_arc2])
surface = geom.add_plane_surface(loop, holes=[eye_loop])
# Generate the mesh
mesh_uniform = geom.generate_mesh()
mesh_uniform = [mesh_uniform.points[:,0:2], mesh_uniform.cells[1].data.astype(int).tolist()]
# Create a physics model
physics = LinearElasticity(E=1.0, nu=1/3, thickness=1.0, type='PlaneStress')
mesh = GeneralMesh(np.array(mesh_uniform[0]), np.array(mesh_uniform[1]), physics=physics)
# Create a stiffness kernel
if mesh.is_uniform:
stiffness_kernel = UniformStiffnessKernel(mesh=mesh)
else:
stiffness_kernel = GeneralStiffnessKernel(mesh=mesh)
# Create a solver
solver = CHOLMOD(kernel=stiffness_kernel)
# Create a finite-element object
fe = FiniteElement(mesh=mesh, kernel=stiffness_kernel, solver=solver)
# Visualize the mesh
plt.figure(figsize=(10, 10))
fe.visualize_problem()
plt.tight_layout()
plt.axis('off')
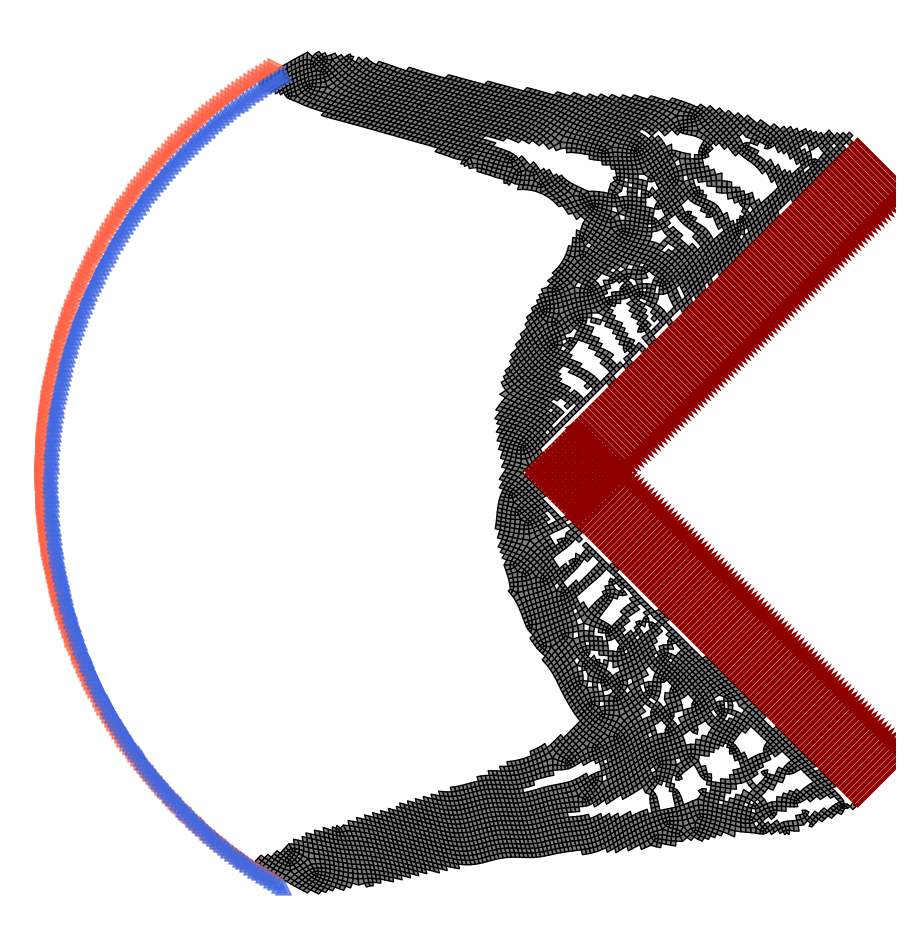
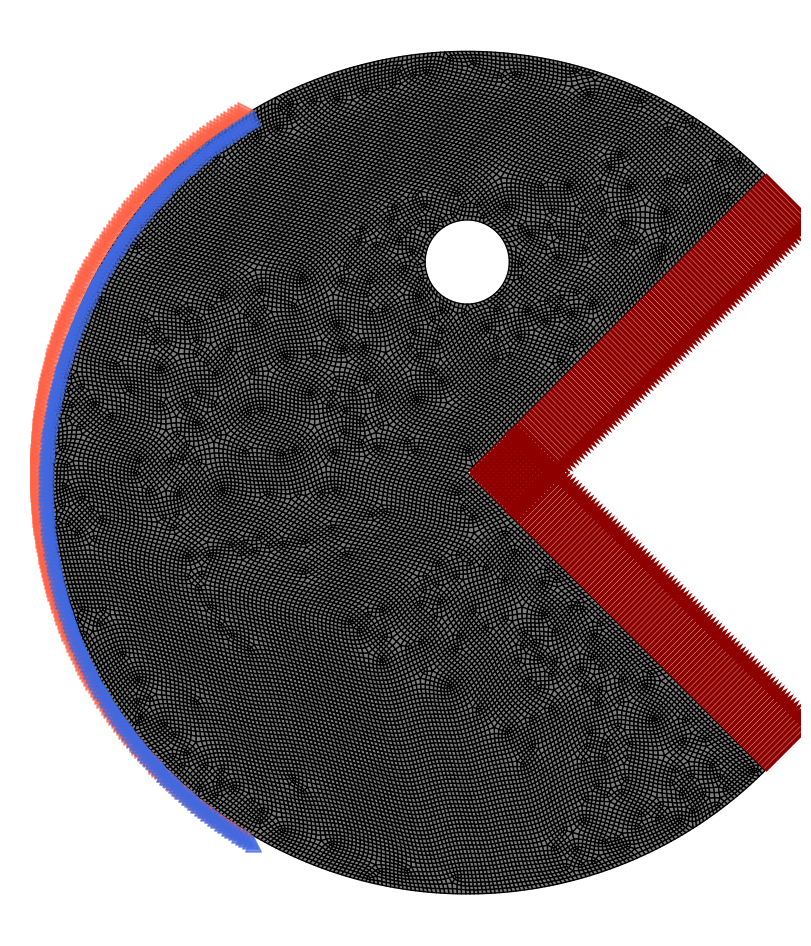
Now we will setup boundary conditions for this toy problem:
fe.reset_dirichlet_boundary_conditions()
fe.reset_forces()
# find nodes on the boundary of the packman circle
bc_nodes = np.isclose(np.linalg.norm(mesh.nodes[:,0:2] - np.array([0.5,0.5]), axis=1),0.5)
bc_nodes = np.logical_and(bc_nodes, mesh.nodes[:,0] < 0.25)
bc_nodes = np.where(bc_nodes)[0]
fe.add_dirichlet_boundary_condition(
node_ids=bc_nodes,
positions=None,
dofs=np.array([[1, 1]]),
rhs=0.0
)
# apply load at the mouth of the packman
upper_mouth = np.logical_and(np.isclose(np.abs(np.dot(mesh.nodes,np.array([-1,1]))),0), mesh.nodes[:,0] > 0.5)
force_node = np.where(upper_mouth)[0]
force_nodes = force_node[np.isin(force_node, bc_nodes, invert=True)]
force = np.array([[1,-1]])/force_nodes.shape[0]/4 # Broadcastable, If needed you can provide one for each point
fe.add_point_forces(
node_ids=force_nodes,
positions=None,
forces=force
)
lower_mouth = np.logical_and(np.isclose(np.abs(np.dot(mesh.nodes,np.array([1,1]))),1.0), mesh.nodes[:,0] > 0.5)
force_node = np.where(lower_mouth)[0]
force_nodes = force_node[np.isin(force_node, bc_nodes, invert=True)]
force = np.array([[1,1]])/force_nodes.shape[0]/4 # Broadcastable, If needed you can provide one for each point
fe.add_point_forces(
node_ids=force_nodes,
positions=None,
forces=force
)
# Visualize the problem
plt.figure(figsize=(10, 10))
fe.visualize_problem()
plt.tight_layout()
plt.axis('off')
Now we can just setup the problem and optimizer like before:
# Define the filter kernel for TO
filter_kernel = GeneralFilter(mesh=mesh, r_min=2.0 * 0.005) # In general cases r_min is mesh space, not scaled by mesh size be cassreful!
# Define the TO problem
to_problem = MinimumCompliance(
FE=fe,
filter=filter_kernel,
E_mul=[1.0], # You can pass a list of values to perform multi-material TO
volume_fraction=[0.25], # You can pass a list of values to perform volume fraction control for each material
void=1e-9, # You can pass a value to set void modulus
penalty=3, # You can pass a value to set penalty factor
#penalty_schedule = lambda p, i: (p-1)*np.round(4 * min(100, i) / 100)/4 + 1, # You can pass a function to set penalty schedule here
heavyside= True, # You can pass a boolean to use heavyside or not
eta=0.5, # You can pass a value to set eta - only used for heavyside
beta=2.0, # You can pass a value to set beta, or a function of iteration to set beta schedule - only used for heavyside
)
# Define the optimizer
optimizer = PGD( # You can use any of the optimizers in pyFANTOM: OC, MMA, PGD
problem=to_problem,
change_tol=np.inf, # No change tolerance
fun_tol=1e-4, # Function tolerance (convergence criterion for the optimizer)
)
maximum_iterations = 300
Progressbar = trange(maximum_iterations, desc='Optimizer Iterations', leave=True)
objective_history = []
for i in Progressbar:
optimizer.iter()
Progressbar.set_postfix(
optimizer.logs()
)
objective_history.append(optimizer.logs()['objective'])
if optimizer.converged():
print(f'Converged in {i} iterations')
break
The unstructured mesh optimization converged in 198 iterations:
Optimizer Iterations: 66%|██████▌ | 198/300 [08:03<04:09, 2.44s/it, objective=1.47, variable change=0.12, function change=9.93e-5, iteration=200, residual=9.82e-13] Converged in 198 iterations
# Visualize the solution
plt.figure(figsize=(10, 10))
to_problem.visualize_solution()
plt.tight_layout()
plt.axis('off')